|
 |


  |
|||
 |
 |
||
 |
|||
|
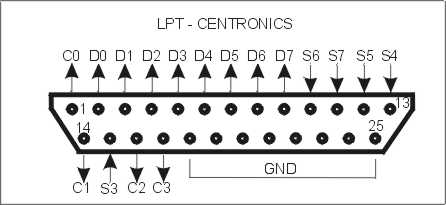
SILNIKI KROKOWE I LTP LPT Zanim przystąpimy do zniszczenia naszego ulubionego PC trochę informacji na temat portu LPT zwanego równoległym lub też drukarkowym. Standardowo w naszym PC znajduje się jeden taki port - żeńskie DB25 o adresie 378Hex, oczywiście adres ten będzie się zgadzał do momentu pogrzebania w biosie gdzie można zmienić adres. Informacje zawarte odnośnie LPT z ustawieniem SPP lub NORMAL - też bios JOPIS PINÓW
Do nie standardowego sterowania wej/wyj wystarczy naprawdę garść informacji:
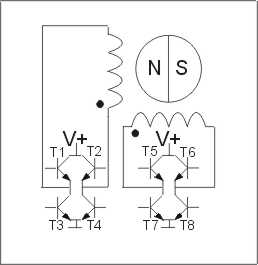
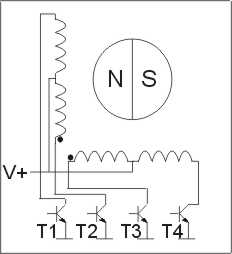
SILNIKI KROKOWE - PODSTAWY Zasadniczo mamy sporo rodzajów silników krokowych, o różnej dokładności różnej konstrukcji - na ten temat jest sporo informacji w sieci. My skupimy się na podstawach praktycznych. Więc mamy silniki o uzwojeniach bipolarnych - poznajemy je generalnie po tym że mają 4 przewody wyjściowe, oraz unipolarne posiadające 6 przewodów wyjściowych, czasami 5 przewodów - co oznacza że zasilające są już połączone. BIPOLARNY
Jak widać cykl składa się z 4 kroków po czym sekwencja jest powtarzana - kierunek obrotów zależy od kolejności podawania kroków tj. Krok 1,2,3,4,1,2.. to obroty w jednym kierunku a krok 4,3,2,1,4,3.... to przeciwne obroty. W silnikach bipolarnych należy zwrócić szczególną uwagę na to że występują stany zabronione np. T1 i T3 ON - co prawie na pewno spowoduje uszkodzenie sterowania. UNIPOLARNY
W tym przypadku sekwencja jest identyczna oraz kierunek obrotów ustalany jak w silniku bipolarnym. Jak łatwo zauważyć sterowanie jest znacznie prostsze, ale jak to w życiu bywa coś kosztem czegoś - silniki unipolarne mają mniejszy moment obrotowy niż bipolarne o podobnych parametrach /gabarytach/. Możemy też zastosować sekwencję 8 krokową tkz. sterowanie 1/2 kroku co dwukrotnie zwiększa rozdzielczość silnika ale zmniejsza moment obrotowy.
Jak widać do sterowania jednym silnikiem potrzebujemy 4 bity - co przy LPT daje nam bezproblemowe sterowani e dwoma silnikami bez wielkiej elektroniki linie D0 - D7.PRAKTYKA Uwaga opisywane urządzenie dotyczy pewnej grupy silników i nie może być przyjęte jako uniwersalne rozwiązanie problemu sterowania a jedynie jako metoda. Schemat: prawda że prosty - obok fotka zmontowanego układu który sterował kamerą internetową.
Kolorystyka kabli 2 x brązowy - 5V zasilanie czerwony - 9 pin biały - 10 pin niebieski - 11 pin pomarańczowy - 12 pin Oprogramowanie powstało na VB5 i jest dostępne w wersji skompilowanej i kodu źródłowego oraz niezbędnej biblioteki i ocx Powodzenia w eksperymentowaniuJ PEPI KOSZALIN 16.02.2002 Ponieważ były prośby o program na dwa silniki - poniżej link do wersji 2 silnikowej - a niebawem sterownik do czterech silników + dodatkowe obwody sterujące PEPI KOSZALIN 09.04.2004
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
|
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||