
Podstawowe informacje
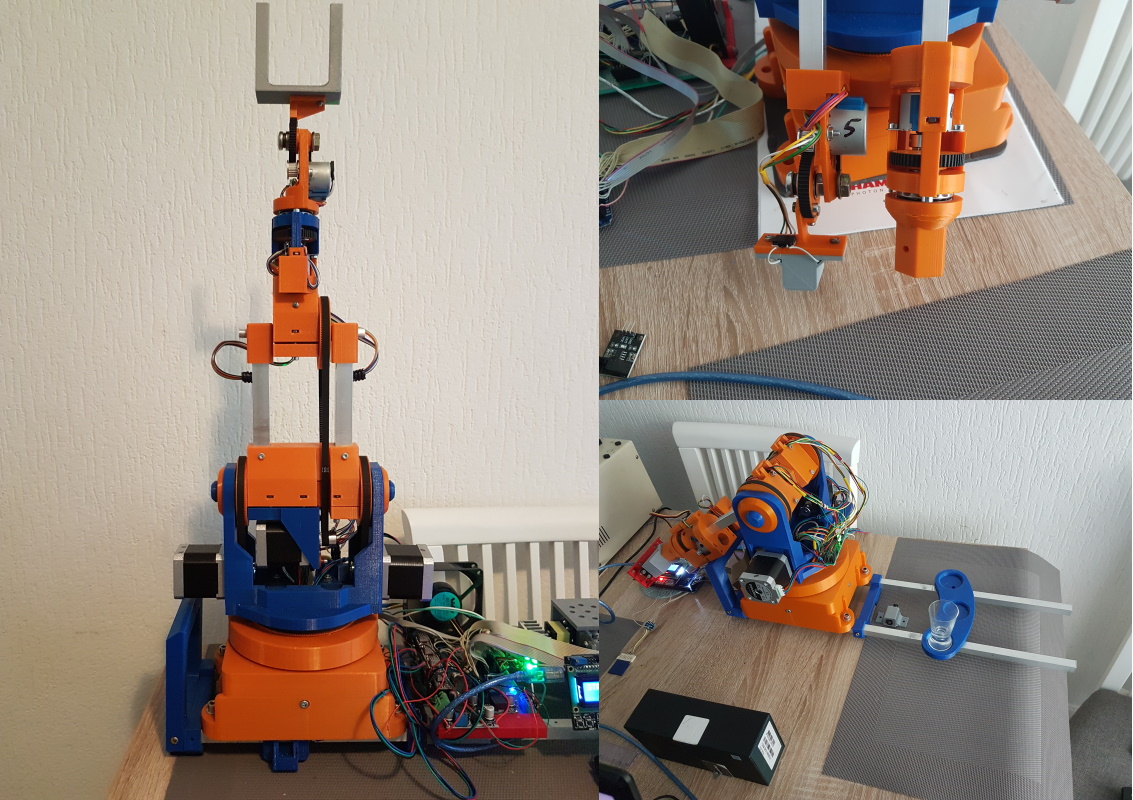
Robołapka o 5 punktach swobody lub widok po prawej z możliwością pracy 2x 3 punkty swobody
Zużyte materiały
4x silnik krokowy NEMA17 = 160 zł
1x klon Arduino MEGA2560 = 40 zł
2x Silnik krokowy 28BYJ-48 12V + ULN2003 = 16 zł
2x STEP-DOWN DC LM2596S 1.5-35V 3A = 8zł
5mb przewód wstążkowy do złącz IDC10 2,54mm = 10zł
1x Zasilacz przetwornica AC/DC 230V/24V 5A 120W = 32 zł
1x Łożysko kulkowe wzdłużne oporowe 51118 90x120x22 = 18 zł
2x Łożysko kulkowe wzdłużne oporowe 51106 30x47x11 = 6 zł
10x Łożysko kulkowe 608 2RS 8x22x7mm = 8zł
6x Zębatka GT2 20 zębów pod pasek 6mm = 30 zł
4x Sterownik silnika krokowego DRV8825 StepStick = 36 zł
2x Pasek GT2 zamknięty 200mm/6mm = 12 zł
1x Pasek GT2 zamknięty 500mm/6mm = 16 zł
1x Pasek GT2 zamknięty 268mm/6mm = 9 zł
Filament około 1kg /u mnie to DD/ = 80 zł
elementy drobne /śrubki, czujniki krańcowe,elementy aluminiowe itd./ = 40 zł
SUMA = 521 zł plus to co bezcenne – radosna twórczość własna :).
---------------------------------------------------------------------------------------------------
Ceny z czerwiec 2020.
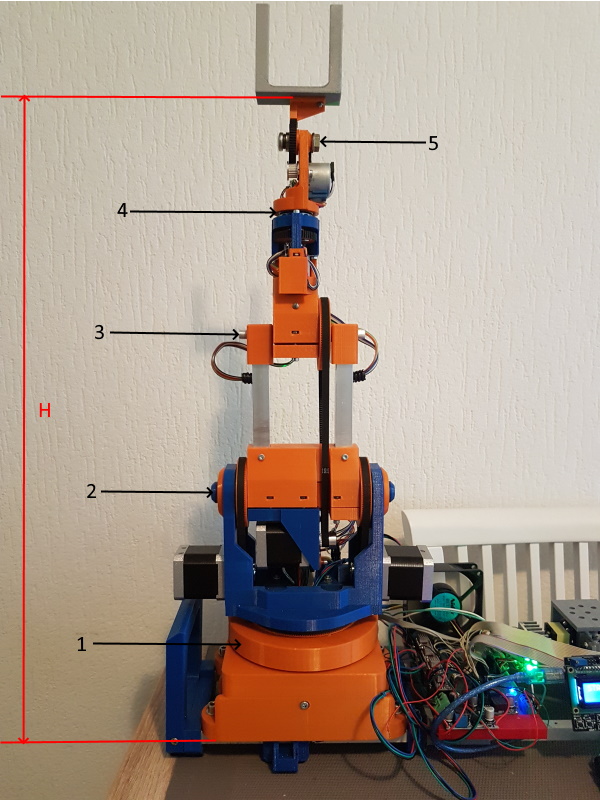
Punkty swobody.
1 – przełożenie 1/8 matematycznie osiągane max 1 krok = 0,0140625 stopnia
2 – przełożenie 1/5 matematycznie osiągane max 1 krok = 0,0225 stopnia
Ten punkt sterowany jest 2 silnikami i może pracować jako 1 w trybie 5 punktowym lub jako 2 osobne w trybie 2x 3 punkty
3 – przełożenie 1/5 matematycznie osiągane max 1 krok = 0,0225 stopnia
4 - przełożenie 1/3 matematycznie osiągane stałe 1 krok = 0,05859375 stopnia
5- przełożenie 1/3 matematycznie osiągane stałe 1 krok = 0,05859375 stopnia
Punkty 4/5 mają krańcówki na czujnikach hala
Punkty 2/3 ustawiane są grawitacyjnie do pozycji spoczynkowej
Silniki punktów 1/2/3 (NEMA17) mogą być przełączane w trakcie pracy na mikrokrok z podziałem 1 1/2 1/4 1/8 1/16 w zależności od potrzeby.
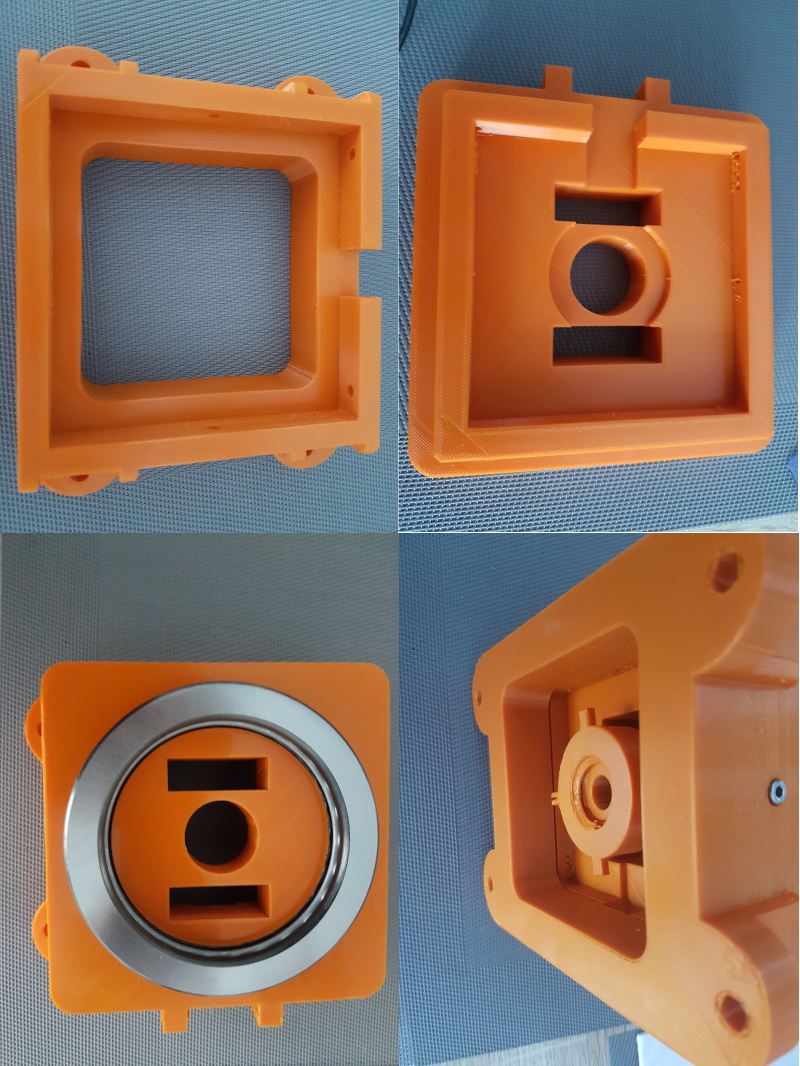
Luźne fotki z budowy
A
B

C
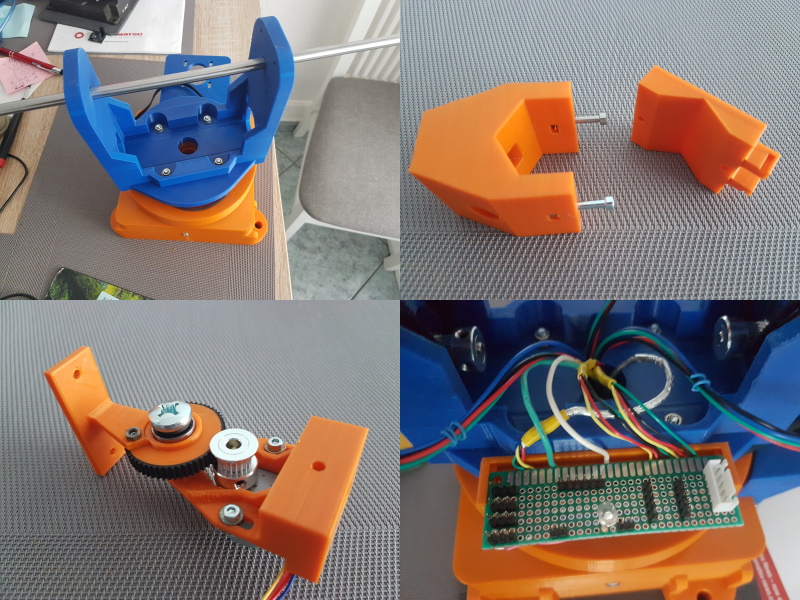
D

Widok w stanie zero pozycja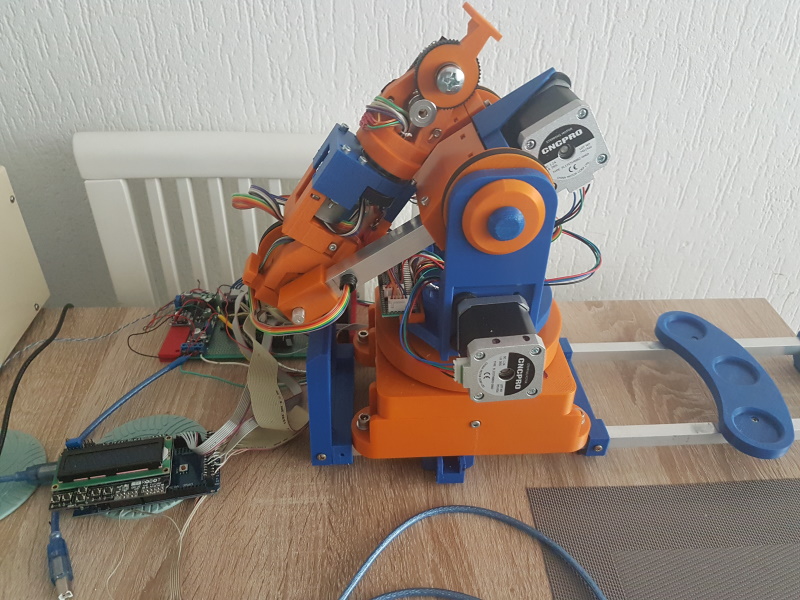
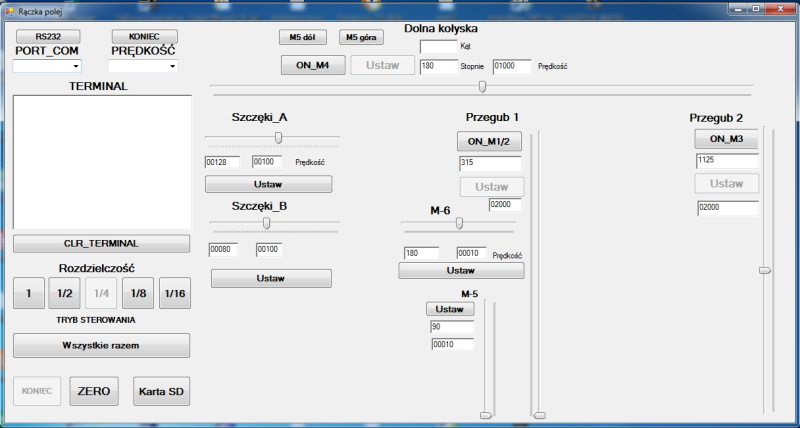
Sterowanie
Na obecna chwilę, mam 2 proste programy na win – oraz bezprzewodowy pad do PS2.
Zarówno program jak i pad ma możliwość zapisu sekwencji ruchowej do pliku na karcie SD, a tym samym powtarzanie zapisanych sekwencji. W związku że arduino troszkę zbyt wolno obsługuje zapis na SD, planuję wymienić kartę na flash W25QXX aby swobodnie strumieniować zapis.


KOSZALIN 10.11.2020